奣棯
丂丂僥儗價媦傃價僨僆梡愒奜慄儕儌僐儞偺憲怣婍偐傜憲怣偝傟傞丄僐乕僪傪敾掕偟惂屼
丂丂抂巕傪丄倧値丄倧倖倖丄媦傃斀揮偡傞偙偲偑弌棃傑偡丅
丂丂壠揹惢昳嫤夛儂乕儅僢僩偵弨嫆偟偰偄傞憲怣婍偱偁傟偽丄杦偳摦嶌壜擻偵偟偰偁傝
丂丂傑偡丄摉曽偱僜僯乕惢儅儖僠儕儌僐儞憲怣婍偱妋擣傪峴偭偨儊乕僇乕偼丄徏壓丄擔
丂丂棫丄搶幣丄俶俤俠丄僒儞儓乕丄價僋僞乕丄僷僀僆僯傾偺僥儗價儕儌僐儞偑摦嶌偟傑
丂丂偟偨丄僜僯乕丄嶰旽丄僔儍乕僾偼儂乕儅僢僩偑彮偟堘偆偨傔摦嶌偟傑偣傫丅偨偩偟
丂丂摦嶌偟偨儊乕僇乕偺弮惓儕儌僐儞偱妋擣偼偟偰偄傑偣傫丅傑偨丄堦偮偺儊乕僇乕偺
丂丂儕儌僐儞偵傕儂乕儅僢僩偵婔偮偐偺庬椶偑桳傞偨傔丄昁偢偆傑偔摦嶌偡傞偲偼尷傝
丂丂傑偣傫丅
丂丂俹倝們侾俀們俆侽俋偵偟偰偄傑偡偑丄僾儘僌儔儉僗僥僢僾偑敿暘偺侾俀們俆侽俉偱
丂丂偐傑偄傑偣傫丅偨偩偟丄僐乕僪傪妛廗婰壇偡傞婡擻偼桳傝傑偣傫偐傜僜乕僗僾儘僌
丂丂儔儉偵庴怣敾掕偺僐乕僪傪婰弎偡傞昁梫偑桳傞偨傔丄儕儌僐儞憲怣婍傪曄偊傞応崌
丂丂偼丄僜乕僗僾儘僌儔儉傪曄峏偟側偗傟偽側傝傑偣傫丅偦偺堊僐乕僪夝愅婍偑柍偄偲
丂丂曄峏偑弌棃傑偣傫丅
夞楬恾
丂丂僒儞僾儖僾儘僌儔儉偱偼丄擔棫惢偺僥儗價儕儌僐儞偺僠儍儞僱儖倀俹俲倕倷偲壒検
丂丂倀俹倠倕倷傪庴怣偟偰2ch 偺弌椡抂巕傪僩僌儖摦嶌傪峴偆傛偆偵彂偄偰桳傝傑偡丅
丂丂擔棫惢偺儕儌僐儞僐乕僪偵偟偨偺偼丄儕儌僐儞僷儖僗偺帪娫偑斾妑揑挿偔敾掕偑偟
丂丂傗偡偔埨掕摦嶌偑婜懸弌棃偦偆偩偭偨偐傜偱偡丅偨偩偟丄擔棫惢偺僥儗價儕儌僐儞
丂丂偵俀庬椶桳傞傛偆側偺偱拲堄偑昁梫偱偡丅
丂 僐儞僼傿僌儗乕僔儑儞儗僕僗僞偺愝掕偱丄俵俠俴俼偼撪晹倁們們愙懕丄俷俽俠偼撪
丂丂晹俼俠敪怣婍偱僥僗僩傪峴偭偰偁傝傑偡丅
丂丂堦墳撪晹僋儘僢僋偱摦偐偡帠傪峫偊偰丄僄儔乕僠僃僢僋傪娒偔偟偰偁傝傑偡偑丄
丂丂壏搙曄壔偵懳偡傞埨掕惈傪峫偊傞偲係俵俫倸偺僙儔儘僢僋偵偟偨傎偆偑椙偄偲巚
丂偄傑偡丅
曄峏曽朄
丂巊梡栚揑偵崌傢偣偰曄峏傪峴偆応崌偼丄僜乕僗僼傽僀儖偺係僇強偺 ;***** 偱埻
丂丂傑傟偨晹暘傪曄峏偟傑偡丅側偍丄曄峏売強偼僜乕僗僼傽僀儖偺愭摢晹暘偵傑偲傔偰
丂丂桳傝傑偡丅
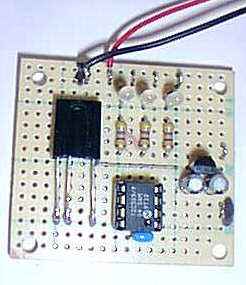
丂侾丒儕儌僐儞庴怣僐乕僪愝掕
儕儌僐儞偺僐乕僪傪挷傋偰丄僐乕僪夝愅婍偺昞帵偟偨侾俇恑僐乕僪偵彂偒懼偊傑偡
丂丂僒儞僾儖偱偼俀屄偟偐巊梡偟偰偄傑偣傫偑嵟戝俁屄傑偱弌棃傑偡丅僜乕僗僼傽僀儖
丂丂偺侾侽峴栚偐傜偺埲壓偺晹暘傪曄峏偟傑偡丅
;-----------------------------------------------------------
; --- 儕儌僐儞庴怣僐乕僪愝掕 ---
; ********************************
vr_code0_0 equ 0x50 ; _code0 嵟忋埵(僐乕僪夝撉婡偺嵍抂乯
vr_code0_1 equ 0xaf
vr_code0_2 equ 0x12
vr_code0_3 equ 0xed
vr_code1_0 equ 0x50 ; _code1 嵟忋埵(僐乕僪夝撉婡偺嵍抂乯
vr_code1_1 equ 0xaf
vr_code1_2 equ 0x19
vr_code1_3 equ 0xe6
vr_code2_0 equ 0xff ; _code2 嵟忋埵(僐乕僪夝撉婡偺嵍抂乯
vr_code2_1 equ 0xff
vr_code2_2 equ 0xff
vr_code2_3 equ 0xff
; ********************************
丂俀丒弌椡僺儞偺曄峏媦傃捛壛
丂丂弌椡僺儞傪曄峏丄捛壛傪峴偆応崌偼偦偺愰尵偲弶婜壔傪峴偆昁梫偑桳傝傑偡丅
丂丂僒儞僾儖僾儘僌儔儉偱偼丄俧俹俬俷亅侽傪愒奜慄僙儞僒乕偺擖椡丄俧俹俬俷亅侾偲
丂丂俀傪儕儌僐儞弌椡偵偟偰偁傝傑偡丅偦偆偟偰弶婜壔僾儘僌儔儉偱揹尮傪倧値偟偨帪
丂丂偵丄俫倝倗倛偵側傞傛偆偵偟偰偁傝傑偡丅
丂丂倁們們偲弌椡僺儞偺娫偵儂僩儕儗乕乮俽俽俼乯傪愙懕偟俙俠揹尮傪惂屼偡傞傛偆偵
丂丂梊掕偱丄儕儌僐儞庴怣婍偺揹尮傪倧値偟偨帪偵晧壸偑倧倖倖偵側傞傛偆偵偟偰偁傝
丂丂傑偡丄傕偟晧壸偲偟偰徠柧婍嬶傪偟傛偆偡傞偺偱桳傟偽晧壸偑倧値偵側傞傛偆偵偟
丂丂偰偍偔傎偆偑椙偄偲巚偄傑偡丅偦偆偟側偄偲儕儌僐儞憲怣婍偑夡傟偨帪偵徠柧傪揰
丂丂摂偡傞帠偑弌棃側偔側傝傑偡丅偦傟偵偼丄俧俶俢偲弌椡僺儞偺娫偵俽俽俼傪愙懕偡
丂丂傞偐丄弶婜壔僾儘僌儔儉傪曄峏偟傑偡丅僜乕僗僼傽僀儖偺係侽峴栚偐傜偺埲壓偺晹
丂丂暘傪曄峏偟傑偡丅
;---------------------------------------------------------------
; 擖弌椡億乕僩偺愰尵偲弶婜壔
;---------------------------------------
; _gpio: gpio億乕僩偺憖嶌偡傞價僢僩柤愝掕 拲堄 ( gp-3 偼擖椡偺傒)
; ********************************
_Rcnin equ 0 ; 儕儌僐儞擖椡(偙偺儔儀儖柤偺曄峏嬛巭)
_out0 equ 1 ; 儕儌僐儞弌椡侽
_out1 equ 2 ; 儕儌僐儞弌椡侾
; ********************************
; --- 擖弌椡億乕僩偺弶婜壔乮 gp-0,1,3 僾儖傾僢僾嵪傒 乯 ----
set_gpio: macro
; ********************************
movlw b'00001001' ; gp-0,3(in) gp-1,2,4,5(out)
tris _gpio
movlw b'00000110' ; gp-1,2(High)
movwf _gpio
; ********************************
endm
丂俁丒弌椡摦嶌偺曄峏
丂丂僐乕僪徠崌偟偰崌抳偟偨応崌偼 _code0 偱偁傟偽丄_buff1 儗僕僗僞偺 bit0 偑俫
丂丂倝倗倛偵側傝傑偡丄傑偨 _code1 偱偁傟偽丄_buff1 儗僕僗僞偺 bit1 偑俫倝倗倛
丂丂偵側傝傑偡丄傑偨 _code2 偱偁傟偽丄_buff1 儗僕僗僞偺 bit2 偑俫倝倗倛偵側傝
丂丂傑偡偐傜丄偦傟傜偺價僢僩傪僠僃僢僋偟偰弌椡僺儞傪惂屼偡傞僾儘僌儔儉傪嶌惉偟
丂丂偰偔偩偝偄丅僒儞僾儖偼僩僌儖摦嶌傪峴偄傑偡丅僜乕僗僼傽僀儖偺俈俈峴栚偐傜偺
丂丂埲壓偺晹暘偱偡丅
;------------------------------------------------------------------------
;丂丂丂 *** 僐乕僪徠崌偟偨帪偺弌椡惂屼 *******
;丂_buff1偺bit0(_code0)偲bit1(_code1)偲bit2(_code2)偑庴怣偟偨僨乕僞偱
; 1 偵側傝傑偡丅儊儌儕乕偼_buff2,_count1,_count2 偼帺桼偵巊梡偱偒傑偡
;------------------------------------------------------------------------
out_control: macro
; ********************************
btfss _buff1,_code0 ; 僐乕僪侽偑侾偩偲僗僉僢僾
goto o_cont_10
btfss _gpio,_out0 ; _out0 偑侾偩偲僗僉僢僾
goto o_cont_01
bcf _gpio,_out0 ; _out0 傪侽偵偡傞
goto o_cont_end
o_cont_01:
bsf _gpio,_out0 ; _out0 傪侾偵偡傞
goto o_cont_end
o_cont_10:
btfss _buff1,_code1 ; 僐乕僪侾偑侾偩偲僗僉僢僾
goto o_cont_end
btfss _gpio,_out1 ; _out1 偑侾偩偲僗僉僢僾
goto o_cont_11
bcf _gpio,_out1 ; _out1 傪侽偵偡傞
goto o_cont_end
o_cont_11:
bsf _gpio,_out1 ; _out1 傪侾偵偡傞
o_cont_end: ; 儅僋儘偵偟偨偨傔昁梫偵側傝傑偡丅
nop ; 偙偆偡傞偲杮懱偲撈棫偱偒傑偡
; ********************************
endm
嶲峫暥專
僩儔儞僕僗僞媄弍丂侾俋俋俉擭侾俀寧崋
嵟屻偵
丂丂媈栤揰摍偑偁傟偽儊乕儖傪偔偩偝偄丅弌棃傞尷傝偍摎偊偡傞傛偆偵偟傑偡丅
丂丂偙偺僾儘僌儔儉偼丄僼儕乕僂僃傾乕側偺偱丄帺桼偵攝晍壜擻偱偡丅
丂丂巊梡幰帺恎偺愑擟偱偛巊梡壓偝偄丅
丂丂乽偙偺僜僼僩偵傛偭偰偳偺傛偆側懝奞偑弌偰傕巹偼愑擟傪晧偄偐偹傑偡丅乿
仏 愒奜慄儕儌僐儞庴怣婍僜乕僗僼傽僀儖仏亅亅p-rcn52.lzh ( 栺侾俁倠俛倷倲 )
僼傽僀儖撪梕
picrcn52.asm 僜乕僗僼傽僀儖
picrcn52.hex 俫倕倶僼傽僀儖
picrcn52.gif 夞楬恾
readme.txt 愢柧
僶乕僕儑儞棜楌
Ver5.0B 99/11/03
gp-3 偑擖椡偺傒偵傕偐偐傢傜偢弌椡愝掕偵側偭偰偄偨偺傪廋惓(枹僠僃僢僋)
Ver5.0A
僗僞乕僩僶乕僕儑儞
栠傞